Hello! I am an Engineering Physics student at the University of British Columbia with an interest in innovation, sustainability and creativity
I am interested in the integration of electro-mechanical design and software development, particularly, systems, mechatronics, and firmware engineering. Additionally I have an keep interest in the field of renewable energy.
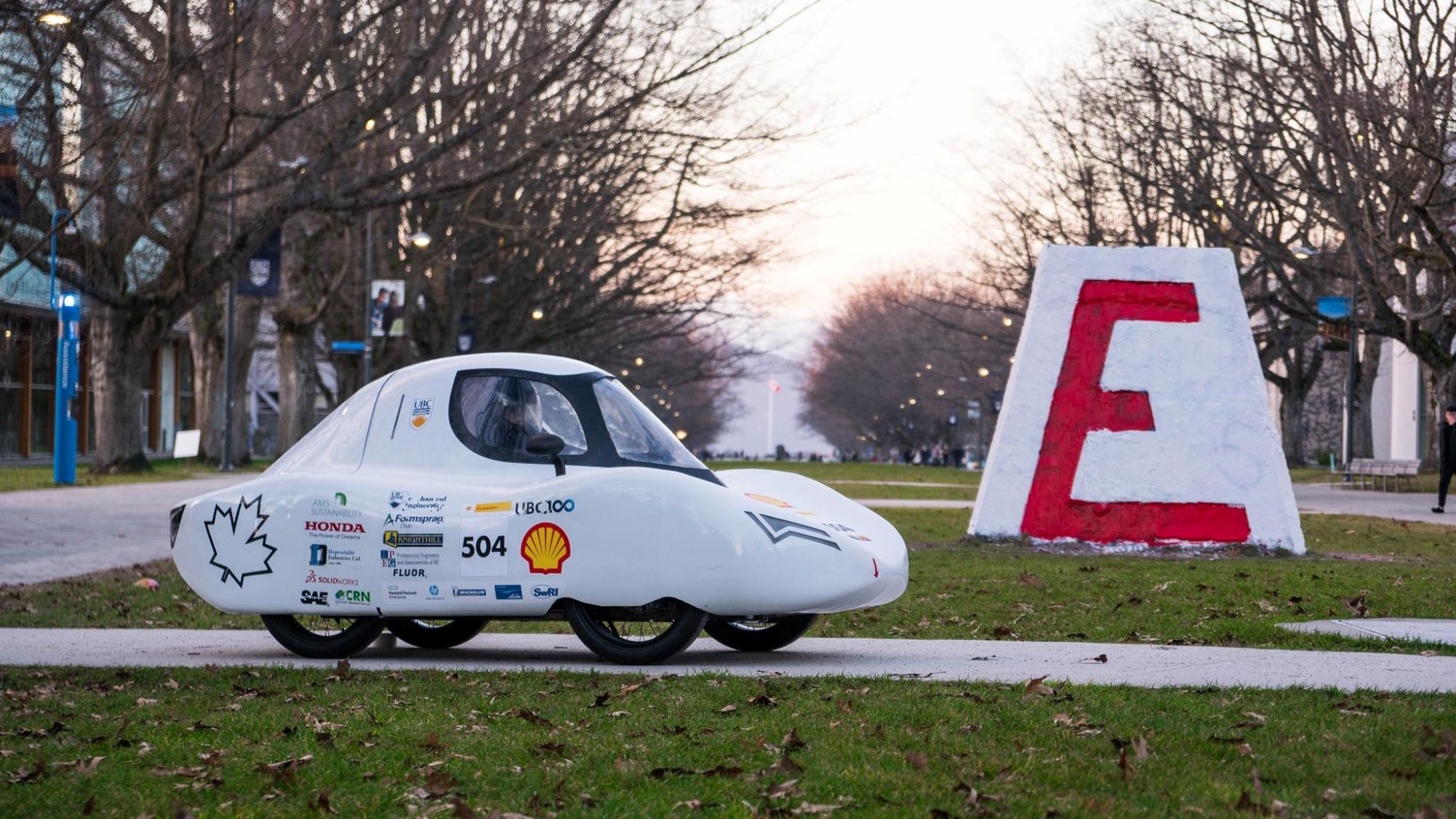
UBC Supermileage is an engineering student design team that builds full sized vehicles with the pursuit to maximize fuel efficiency. We have 3 vehicles on the team. A gasoline prototype vehicle, a battery electric Urban Concept vehicle, and a hydrogen fuel cell prototype vehicle that is currently in the making. The Prototype category vehicles are the ones that truly maximize fuel efficiency while the Urban Concept category vehicle has some limitations and restrictions that make it more closely resembled to vehicles on the road. In 2019 we place 2nd in our competition achieving a fuel efficiency 2229 mpg. While in 2022, we brought our hydrogen fuel cell vehicle to its first competition ever, and became the only fuel cell team to make it out onto the track
I am currently an Electrical Division Lead on the team where I develop the project plans for all of the electrical projects this year. In addition I mainly work on prototyping circuits, designing PCBs and developing firmware for controlling our outputs to the hydrogen fuel cell. We mainly use Kicad and Arduino based code for our systems.
In previous years I was a project lead in the Powertrain division where I work on projects related to the drivetrain such as selecting an efficient motor for our new fuel cell vehicle, determining chain and sprocket configurations, and designing light weight mounts and guards for the motor and the chains. Our parts are modeled using Solidworks and we often machine the parts ourselves using machine shop tools such as waterjet, 3D printer, lathe, mill.
Project Highlight
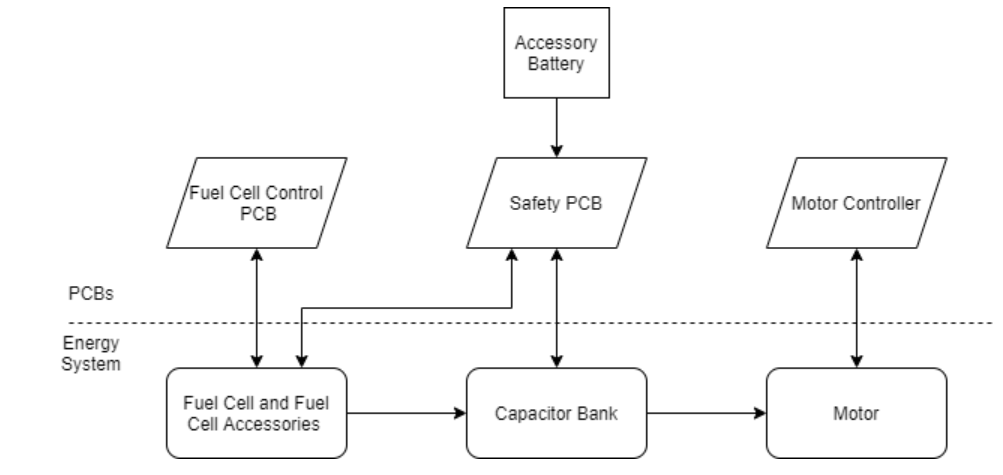
The fuel cell control board is the most recent project that I worked in this team. The purpose of this project is to monitor the operation of the fuel cell and control outputs to improve the overall performance
A system diagram of how the different components fit in to each other
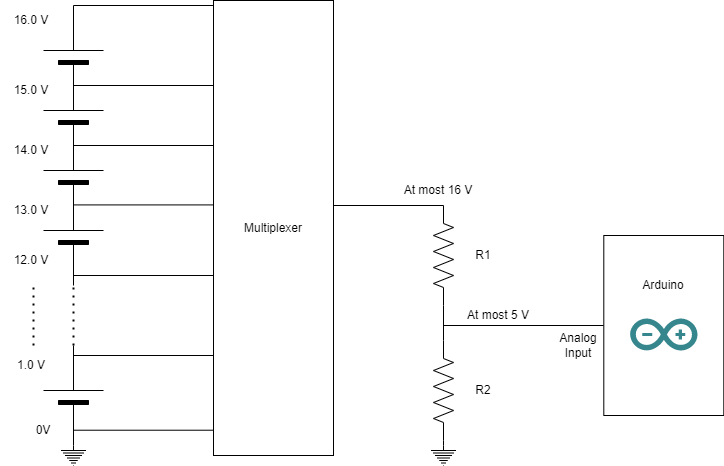
Version 1 of the control board consists of a multiplexer for the circuit which goes through a resistor divider into an analog pin of an Arduino for monitoring the voltages. Not shown in the diagram above, are MOSFETs that control the outputs to the safety board as well as the pumps to the fuel cell
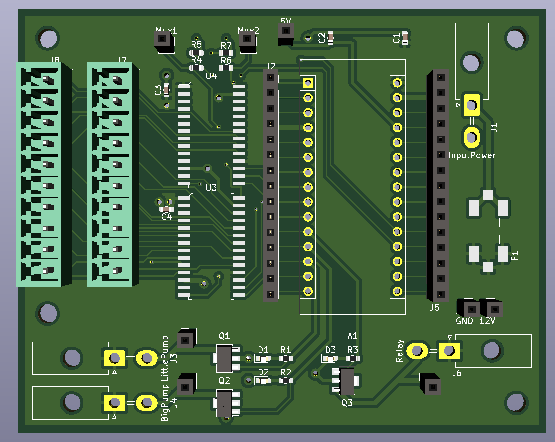
A rendering of our Fuel Cell Control PCB
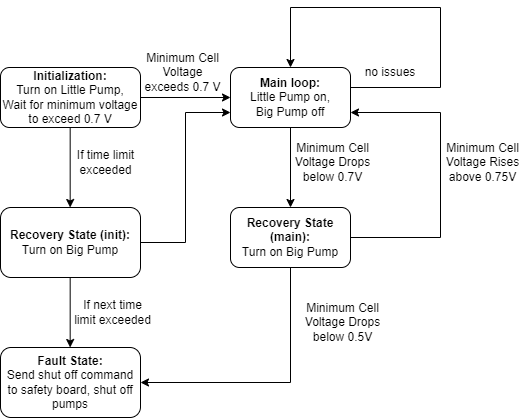
Overall control logic of the first iteration of the firmware
Version 2 is currently being developed at the moment. Some things we plan to incorporate into this iteration is: - Higher voltage monitoring accuracy - Current sensors - Optical link for communication with the safety board and telemetry - Re-routing of power distribution to go through the board - Add additional safety feature to the system to cut off voltage to capacitors if a certain limit is exceeded
A fuel cell emulation board is also in the development to allow us to test the control board without requiring the use of the fuel cell
My full journey throughout the team
In my first year of engineering, I joined a student design team known as UBC Supermileage. During that time I learned how to design and model using solidworks as well as run FEA simulations and learn more about mechanical design in general. I also got hands-on experience using tools for fabrication and assembly of our parts. At the end of my first year, I was invited to attend both of the major team competitions: the Shell Eco Marathon Americas and SAE Supermileage.
In my second year, I was promoted to a powertrain project lead where I worked worked with others to design a new drivetrain from scratch for our new fuel cell powered vehicle. Some of my projects include on selecting an efficient motor, determining chain and sprocket configurations, assisting new members with their projects and assisting the division leads team with administrative tasks such as recruitment and purchasing.
In my third year, I continued my work as a project lead in the powertrain division developing mounts for drivetrain components, spec-ing new motors and gear ratios to be used on the car for a new flatter track, and assisting with fabrication. Our goal was to finish building the hydrogen fuel cell vehicle and have it ready to run by the end of the school year. As most of the school year happened during the Covid-19 pandemic and there were tight restrictions put into place about working in the shop, it was very challenging for us to basically build an entirely new car from scratch. When restrictions were loosened in the summer about 3 weeks prior to our scheduled track day and more people were allowed to be in the shop at the same time, it felt like we were working a second full time job on top of our summer internships. While it was very tiring and stressful at times, we all felt like one big family and in the end it was all worth it to see our fuel cell car run for the very first time.
In my 4th year on the team and I decided to switch over to the Electrical division because I am more interested in going down a career path related to Software and Electronics and wanted to gain more experience in that field. In addition, I am also the webmaster for the team, developing our website in HTML, CSS and JavaScript. In the Electrical division, I have developed the first iteration of our fuel cell control board PCB which monitors voltages in our fuel cell and controls the oxygen pump based on the voltage readings. We assembled the PCB and developed and tested the firmware on the board. We entered our Hydrogen Fuel Cell vehicle into it's very first competition at the Shell Eco Marathon and it successfully passed technical inspection and made it out onto the track. Unfortunately, due to weather and some technical issues, we were unable to complete a valid run, however it was still a huge success to get where we got with that vehicle considering that it was its very first competition. We now have plans for next year on what changes need to be made to improve its efficiency and complete a run. After the Shell Eco Marathon, we shifted focus to our Gasoline vehicle where I led the efforts of integrating the electrical system together.
In my 5th year on the team and I have stepped up to being an Electrical Division Lead. It's really interesting to plan out projects, while also recruiting and onboarding new members, leading tutorials, and assisting members with their projects as needed. We were able to improve upon the fuel cell vehicle operations but this new emerging technology is still in development with more improvement to go.
This is my 6th year on the team. I am currently studying abroad in Denmark so I'm acting as an advisor to support the leads and team members on technical guidance. As well as supporting the team on administrative tasks such as recruiting, project budgets, timelines, and PR.
One of the most exciting parts about being on the team, is that I was given the opportunity to drive our prototype vehicle. From first hand experience, I can definitely say that it is very interesting and a completely different feeling from driving a normal car. When driving this car, you wear a fire suit, fire shoes and a certified drivers helmet for safety measures. You need to be lying down on hard chassis (with no cushioning because that adds weight to the vehicle making it less efficient) with your neck craned at a 90 degree angle to peer through the window in front of you
I also wanted to explore my creative side throughout my time on the team so I've been making the most recent videos and graphics for the team as well.
A photo of our battery electric urban concept vehicle
A photo of our gasoline prototype vehicle at our 2020 track day
A picture of our team on track day as we prepare to test out our vehicle
A picture of me with a fire suit and a drivers helmet as I get ready to test drive our vehicle
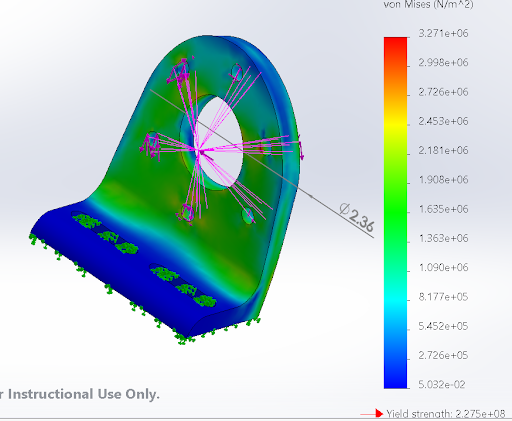
A finite element analysis simulation of our Motor Mount in Solidworks used to verify the strength and durability of the design
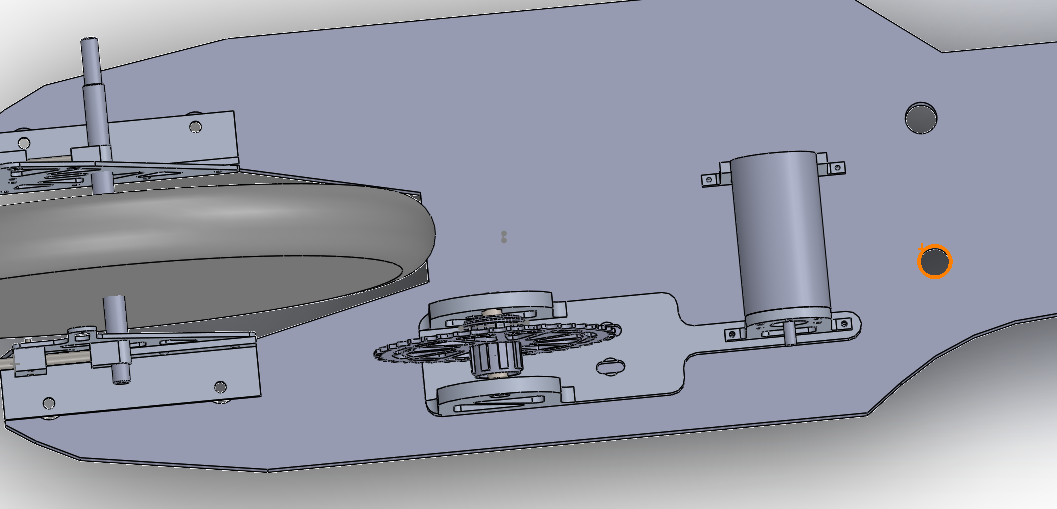
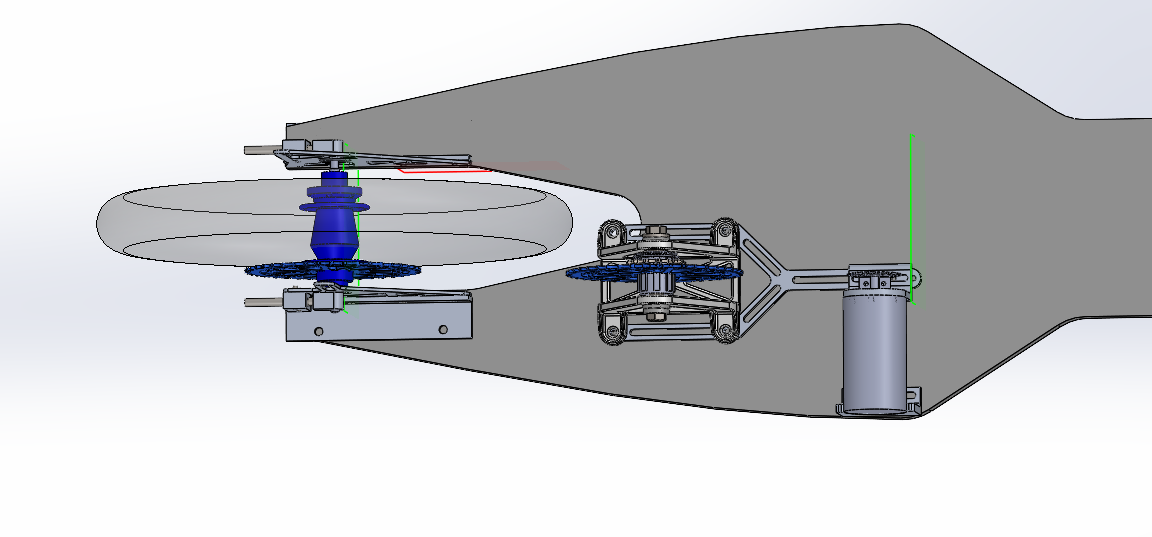
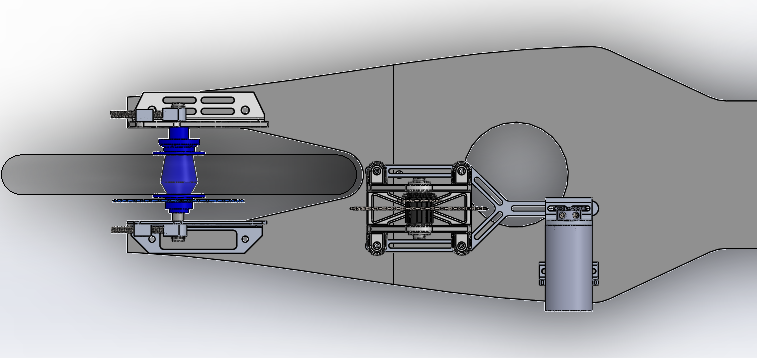
Top view of a few iterations of our fuel cell drivetrain in Solidworks. Design and iterations and exact placements still in progress
A series of parts we designed and sent to the machine shop to fabricate for our fuel cell vehicle during the Covid-19 Pandemic
Our soldering session for the Fuel Cell Control PCB
A video I created that highlights moments from the Shell Eco Marathon 2022
Note: the Github Repo linked here is for the labs, the project repo is currently private but can be made viewable to a specific person upon request
Skills
What it is
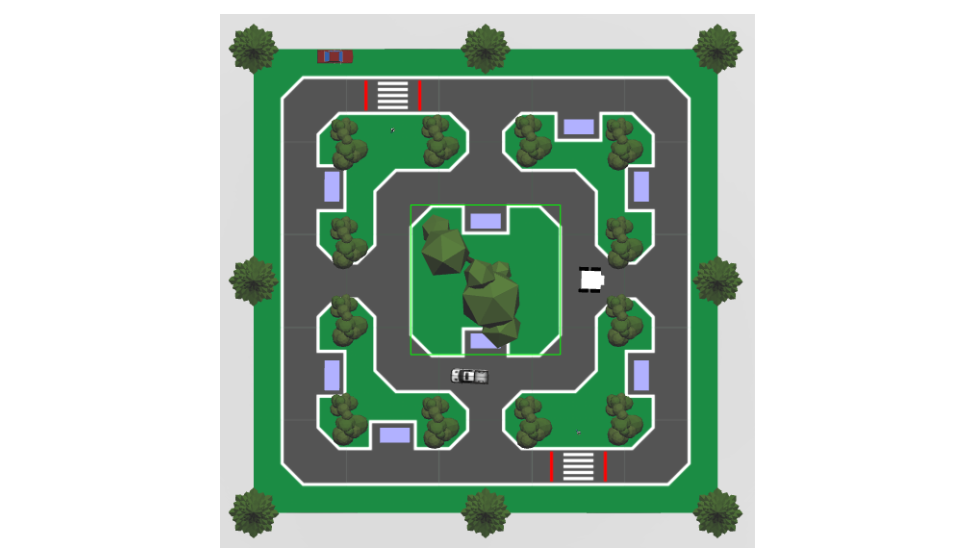
The goal of the project is to develop a self-driving car that can navigate around a simulated world, follow the rules of the road by avoiding collisions with pedestrians and other moving vehicles, as well as reading and reporting the license plates of the parked cars in a simulated ROS environment. Development operates in the Linux Ubuntu environment
Line following and pedestrian collision detection was implemented using PID, OpenCV and HSV thresholds by Jane Dong
License plate detection was implemented using OpenCV, HSV thresholds. Character recognition was implemented using data augmentation to train a Convolution Neural Network by Michelle Li
This is a class project for ENPH 353 which ran from Sept 2020 to Dec 2020. The class is a guided, self-directed project-course to practice some of the most recent techniques and developments in control software and data classification. The first 7 weeks of the course involved working on labs to learn more about how to use different frameworks and techniques which could be implemented in our final project. While the last 6 weeks were used for working on the project that led up to the competition.
Final Product
We were able to get a very reliable CNN implemented, along with a very fast and smooth PID algorithm for line following. This is the result of our final product with debugging screens turned on. Our team's strategy was to maximize points in the outer loop due to the time constraints with implementation
Lab 2 - Sept 16 2020
Below you will find the outcome of one of the first labs in the course. This is a line following program that is based on a video input. It uses Python and Open CV to detect the colour differences in the video and determine where the line is.
Lab 3 - Sept 23 2020
The goal of this lab was to build a simulated robot and world and implement line following from camera feedback using CV and PID. Additionally this allowed me to get familiar with the working with ROS architecture
Lab 4 - Sept 30 2020
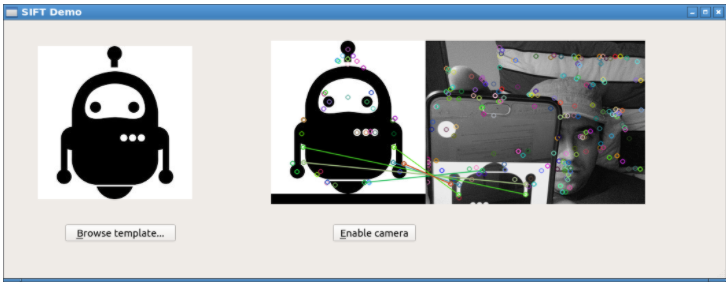
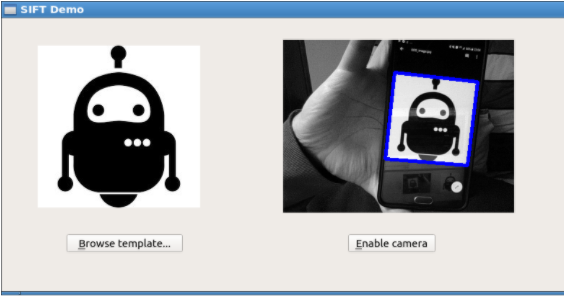
The goal of this lab was to develop an application that given a template image of an object will highlight the object in a live web camera stream. Through this lab I learned how to set up a GUI with PyQt, and then implemented a homography based tracker using SIFT
Key features being tracked
With homography, and enough key points, it is able to recognize that it is the same image
Lab 5 - October 7 2020
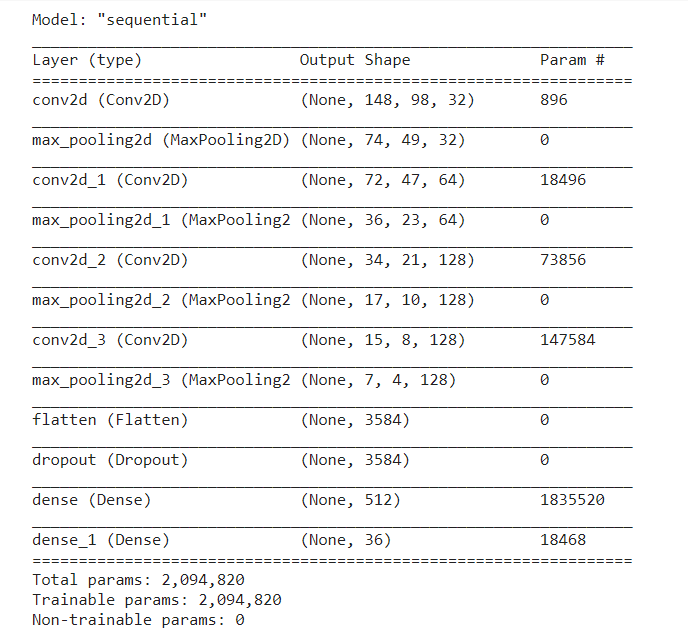
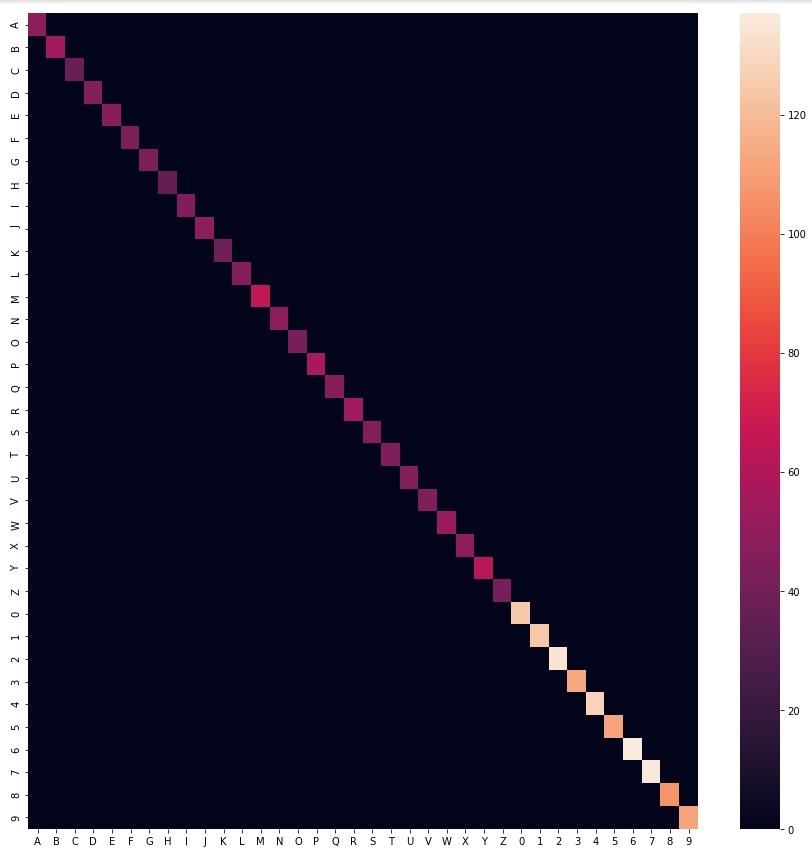
The goal of this lab was to develop a Convolutional Neural Network using Keras for license plate identification
The parameters of the model
The confusion matrix used to test the validity of the model
Lab 6 - October 21 2020
The goal of this lab was to use Q-learning to teach a robot to follow a line
License Plate Detection and Line Following - November 7 2020
As the project began, me and my partner decided to split up the work for the task. I worked on detecting the license plate while she worked on line following. Below is a video of our combined work so far
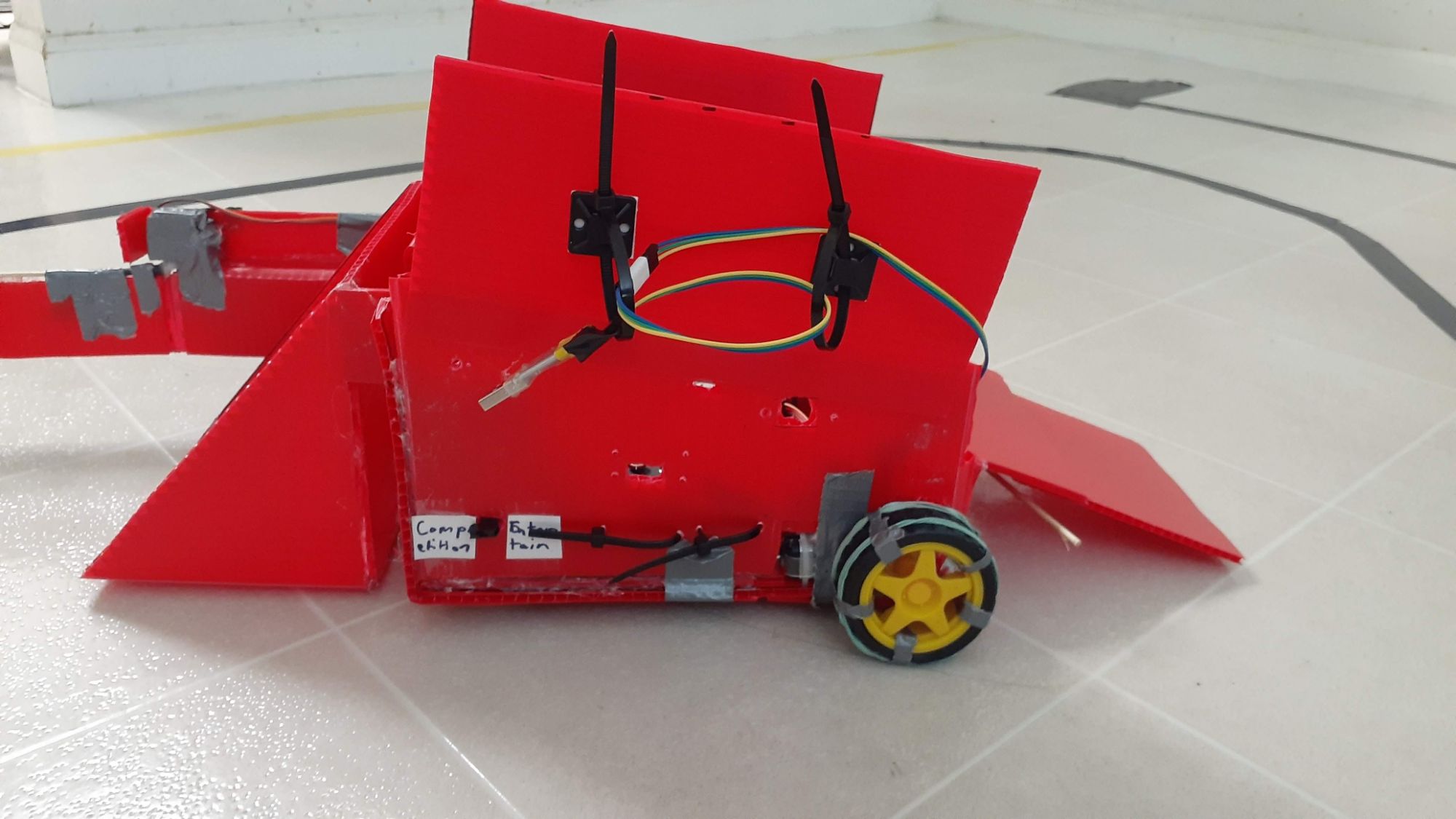
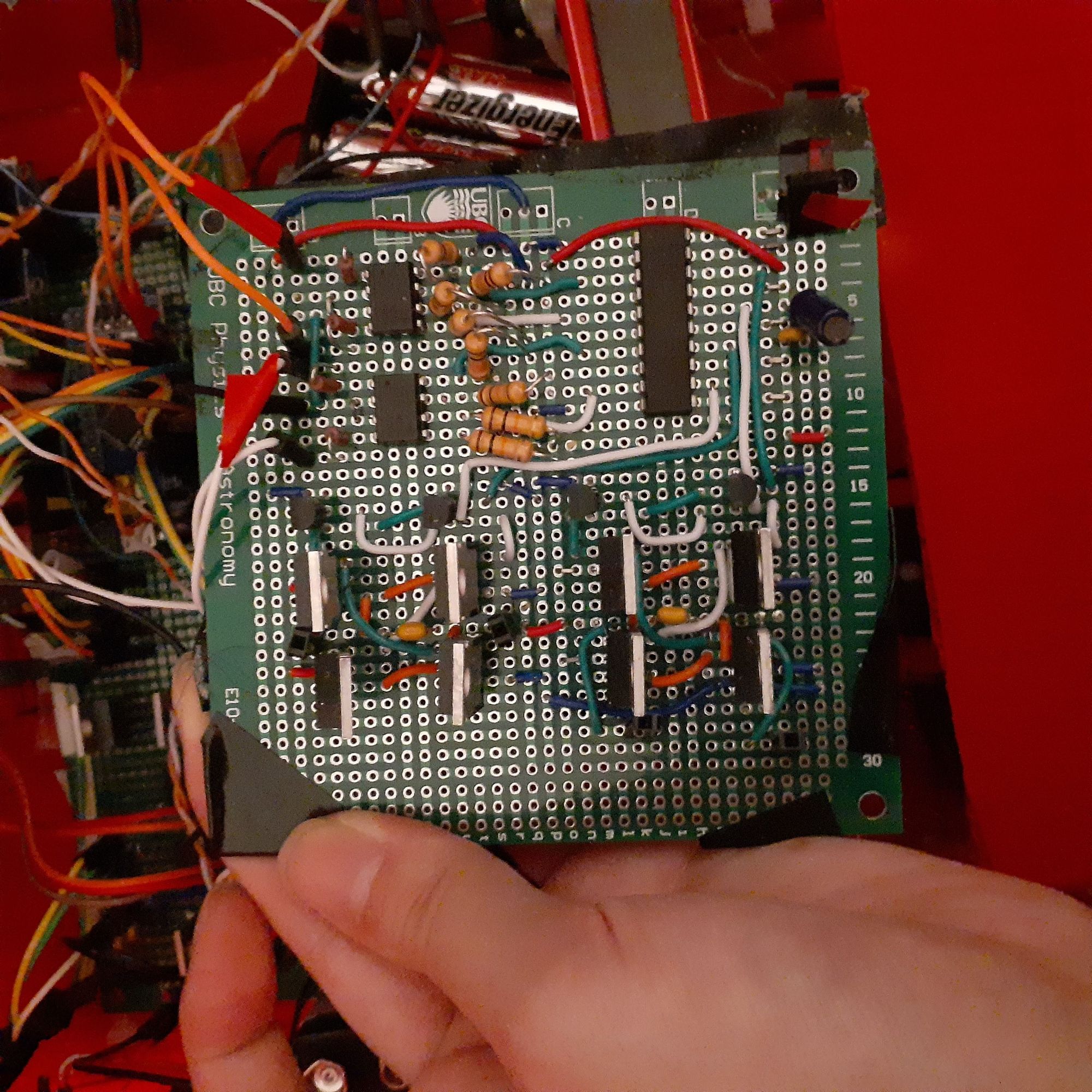
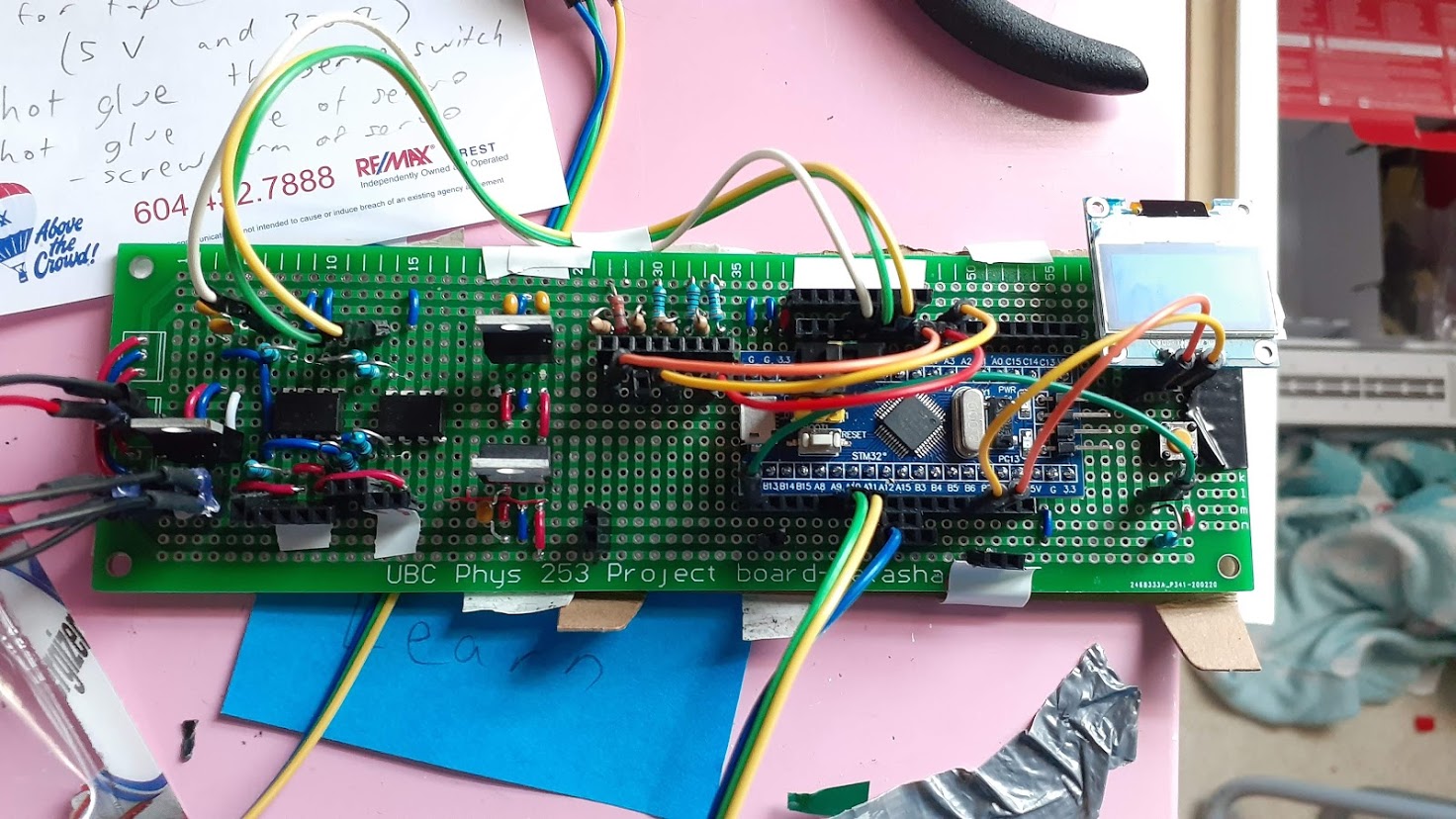
This is a robot that was collaboratively designed and individually built, capable of following tape, detecting, retrieving and returning soda cans to a recycling bin. On the mechanical side, It was built using hand tools and corrugated plastic. It uses a STM32 BluePill as a microcontroller and it is programmed in C++ and Arduino Framework. A control algorithm was implemented for tape following. I worked primarily on the electrical side of the robot which involved preparing detailed procedures and electrical schematics for teammates during build sessions which include wiring, shielding and connector plans, alongside PCB layout schematics for H-bridge and DC motor circuits.
The Story
During the summer of my second year of engineering physics, I took a robotics class. The challenge was to design and build a robot that can pick up cans and place them into a recycling bin. Going into this class, I didn't have that much experience in robotics or electronics so I was a little nervous. Especially since the class was running online rather than it usually was in person.
Throughout the few months working on the project, I learned a lot about electronics and got a lot of hand on experience building circuits, debugging and soldering. Our team also learned a lot about remote communication during the span of the project. Since we were collaboratively working on the design of the robot but each individually building our own robot, we made sure to prepare a detailed set of instruction slides for our teammates when it was our turn to lead a build session
A picture of the scoop mechanism of the robot
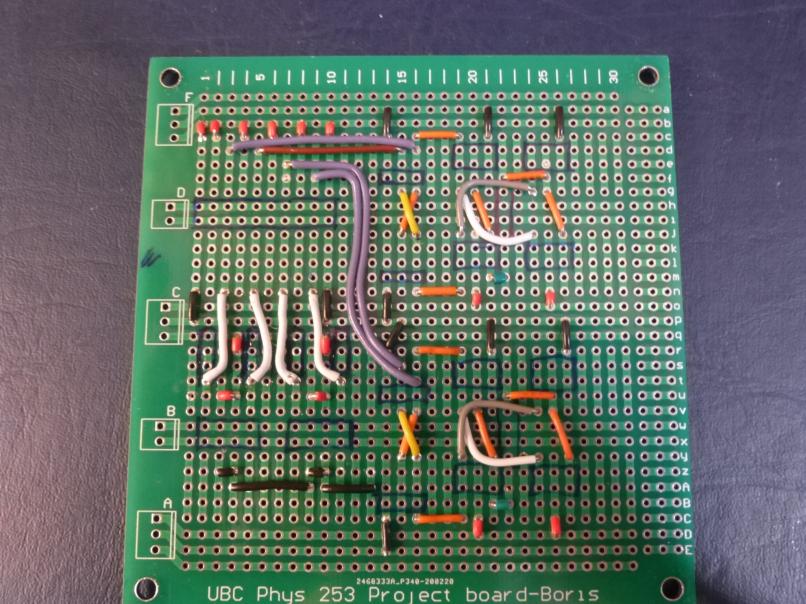
A picture of the PCB layout of the robot
H-bridge wire connections before chip and MOSFET placements
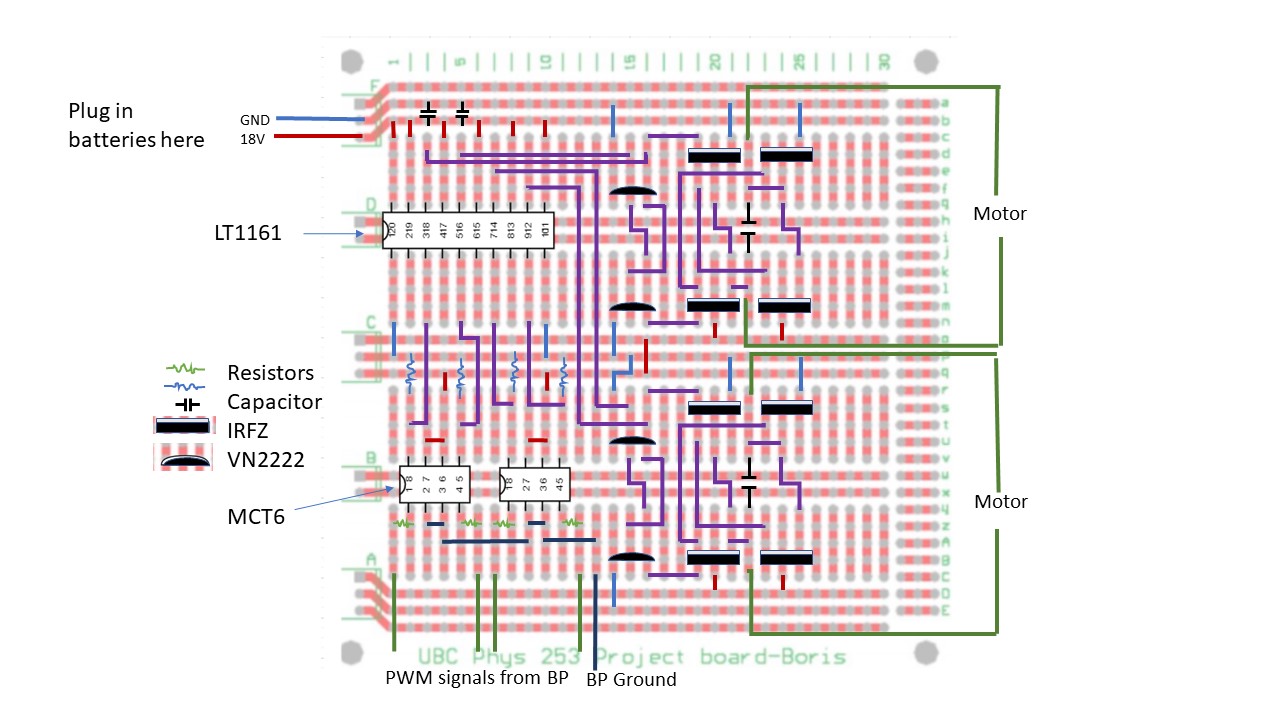
A schematic of the H-bridge PCB board
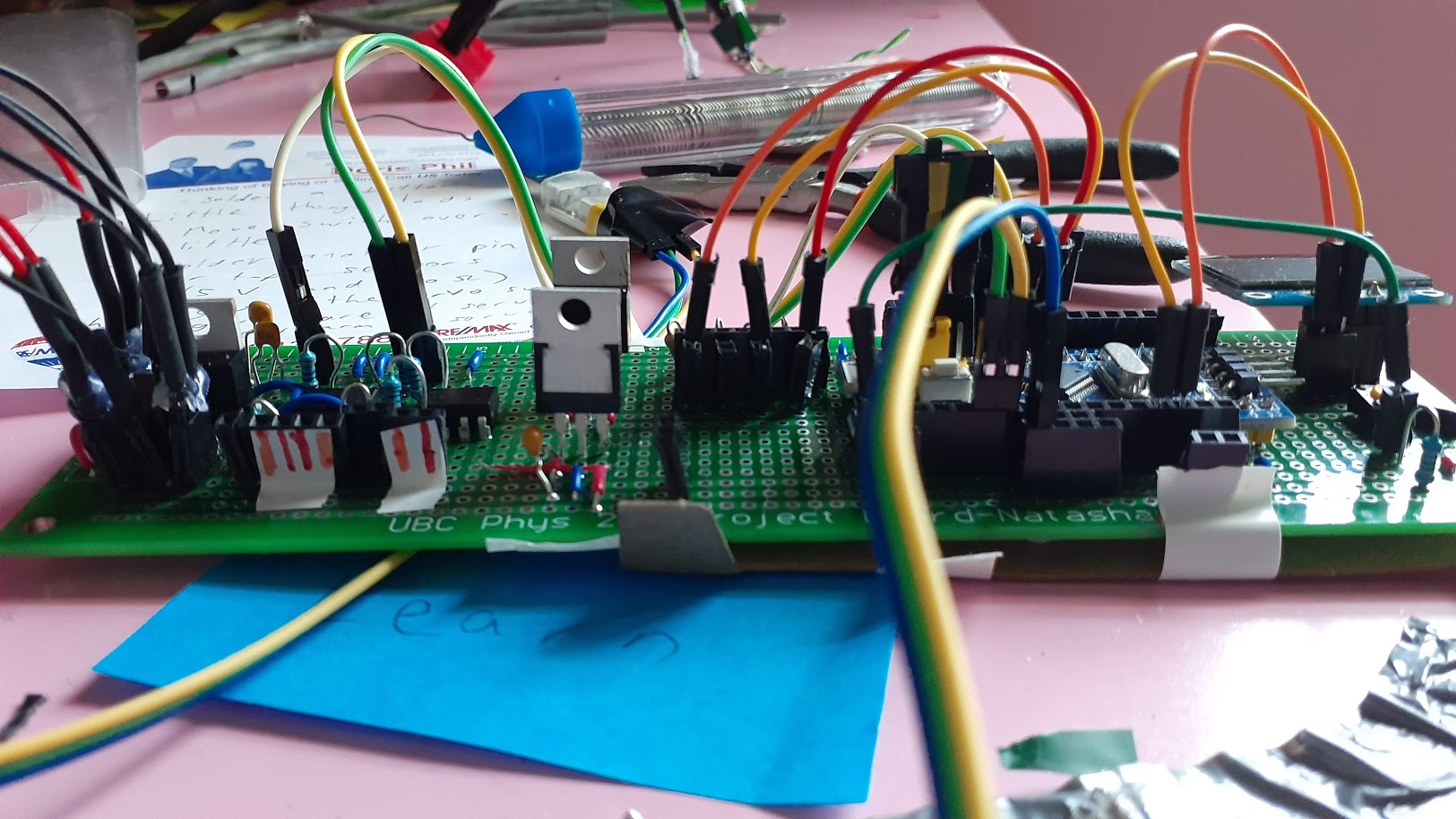
The PCB for our Microcontroller
Fizz Beans
February 2021
External Links:
Github link is private but sections of the code can be made available upon request
Skills
What it Does
Fizz Beans is a weekly opt-in casual coffee chat program that is open to students, staff, and alumni the are part of UBC Engineering Physics (also know as Fizz). It aims to build connections amongst the Fizz community and allow people to practice networking as well. I currently run and maintain it with a small team of 4 other students.
It currently operates as a series of python scripts that are automated on a Google Cloud VM. It utilizes the Google Sheets API to retrieve the users information from the sign up form and it uses the Twilio Sendgrid API to send emails. Email templates are rendered in html.
Credit goes to the original contributors: Tiffany Quon, Zara Lim for getting everything started. And to Yelp Beans, which the code is heavily based off of.
The Story
During the summer of my second year of Engineering Physics, Covid-19 had just hit and classes were moved online. This summer was supposed to be considered the "Robot summer" for my cohort where we spend the summer in the lab with our fellow classmates completing a hands on robotics course along with a few other academic courses. And it was also known to be the summer where our classmates bond and get much closer.
However, since this summer was online, there was quite a lot of disconnect in my year. I wanted to do something to about it, so I reached out to Tiffany who had started Fizz Beans a couple of months ago about how I wanted to run something similar specifically for my year. Since I wanted to get something running quickly, she recommended starting off with posting a spreadsheet of names and matches each week. However a few of my classmates were concerned about privacy and didn't want a spreadsheet posted and I didn't want that to be a barrier for them to sign up so I ended up DM-ing people their matches once a week instead. Manually DM-ing people wasn't too bad since we were a small class so there weren't too many messages that I needed to send and there weren't too many weeks during the summer either. I made a simple MATLAB script that would take a set of names and randomly shuffle and pair names up. In retrospect though, the manual sending of the matches got quite tiring and tedious.
I ended up calling this "Robochat" because it was a casual chatting program that ran during our Robot summer.
As September was approaching, seeing how successful and useful Robochat was over the summer I wanted to ensure that Fizz Beans continued to run during the school year, especially since the school term was still online. Tiffany was graduating soon and wanted to pass on Fizz Beans to someone else and since I ran robochat over the summer, I set up a meeting with her and a few other people in my year who were interested in keeping it running.
Tiffany was very helpful in showing us how Fizz Beans works, how to get everything set up and how the code works and we were able to start Fizz Beans up again for the new school year.
Throughout the year, we made some improvements to the matching algorithm by adding some more randomization to matches, allowing the option for same year matching, and matching into a group of 3 when there was an odd number so someone didn't get left out. We also made shell scripts so that the code could be run more easily. It was also tedious to run a couple of commands each week so we looked into automating that process as well. One option was running a cronjob on our laptop but that required the machine to be one during that time. Another option was using heroku to run a few scripts. However, that required storing our match data somewhere online, otherwise it would get reset each day and we didn't have much experience with databases at that time. So we had someone from our team look into databases during their free time so that we could keep that option open in the future. While searching, I discovered a tutorial on automating python scripts on a google cloud VM so I decided to try it out. After following the tutorial, (and running into a few issues along the way), I was able to automate python script using a cronjob on the VM. So I pulled the code for fizz beans onto there and we were able to run it automatically the following week.
We're continuing to make improvements to the matching algorithm and the overall code and we're looking for another potential method to automate the scripts.
Eco Eats is a hackathon project that was created in 24 hours. It placed top 5 in the hackathon and won the Best Search Engine Experience Award. The app allows users to take a picture of their food and then it displays to the user the environmental impact of their meal in a way that can be easily understood. This includes: number of glasses of water used, CO2 emission equivalency of number of miles driven, and the CO2 emission equivalency of the number of trees required to be planted. This app was built in Android Studio using Java and it was integrated with the google cloud vision API to analyse the food in the photo. Additional research was done to build a database to store the information
The Story
In my second year of engineering physics, I participated in western Canada's largest all female hackathon known as cmd-f.
I teamed up with a friend from my computer engineering class and we found some other people on slack to team up with.
Prior to the hackathon, we met up online to brainstorm some ideas but we ultimately didn't decide on an idea until the hackathon began where we decided we would make an app that lets users take a picture of their food and have it calculate the water and CO2 emissions of the meal. We decided that we would make an app and although none of us had any experience with Android Studio, we agreed that we would try it out and use it as an opportunity to learn as much as we could. Throughout the process, we ran into many issues with getting things set up properly and figuring out how to use Android Studio. After getting more familiar with Android Studio, our next challenge was to get the app to open up a camera. Then we also had the issue of how to get our UI/UX design onto the app.
After many struggles and getting help from mentors and a lot of googling and watch video tutorials, we finally made a working product that we were proud of.
To our surprise, after the initial round of judging, we found out that we were amongst the finalists and would be doing a demo in front of everyone. We were all very excited about this. We ended up winning the Best Search Engine Experience Award. Overall this was a very exciting experience for all of us and a great opportunity to learn.
The problem we were solving is that people experiencing homelessness and without a permanent address lose access to government benefits (welfare, food stamps), healthcare, banks, jobs, and more. They also have trouble obtaining official documents without a mailing address and getting your first piece of ID is notoriously hard because most IDs require an existing form of ID.
Paper Homes is a web application designed for individuals experiencing homelessness to get matched with an address of a vacant home donated by a property owner. Our process to receive proper identification and a permanent address greatly increases their chance of finding stability and recovering from this period of instability.
The Story
In my third year of Engineering Physics, I participated in a virtual hackathon at Stanford known as Treehacks.
For this hackathon, I didn't know any of my teammates prior to event.
A few hours before the hackathon, we met up online and we already had an idea that we liked in mind. We decided that we would make a web application using React. Although I didn't have much experience with React prior to this hackathon, I took on a mostly front end role on this project developing the dashboard for the site. I worked closely with our UI/UX designer, refering to the Figma design and trying to make the website closely match to the design. Throughout the process, I learned a lot of React, Html, CSS and JavaScript. In addition, I also helped on the backend side integrating with Firebase to retrieve the user details depending on the specific user. From working on that, I learned a lot about post/get requests and async functions in JavaScript.
We ended up winning the Art, Tech, and Activism Prize along with the Practice Safe CS: Ethical Frameworks for Technology’s Future prize! Overall this was a very exciting experience for all of us and a great opportunity to learn.
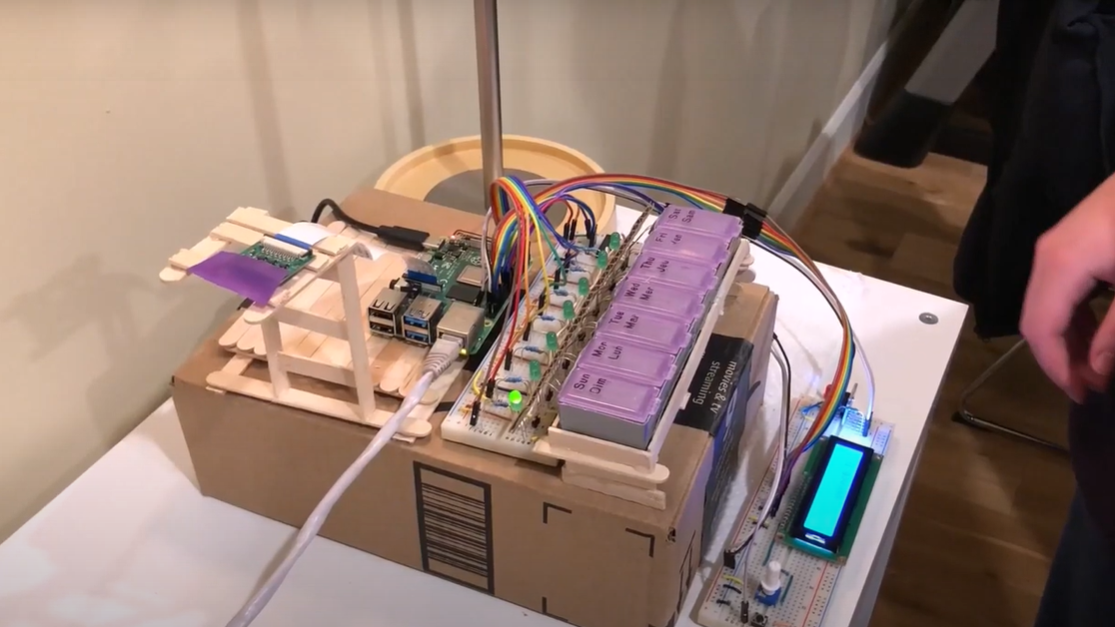
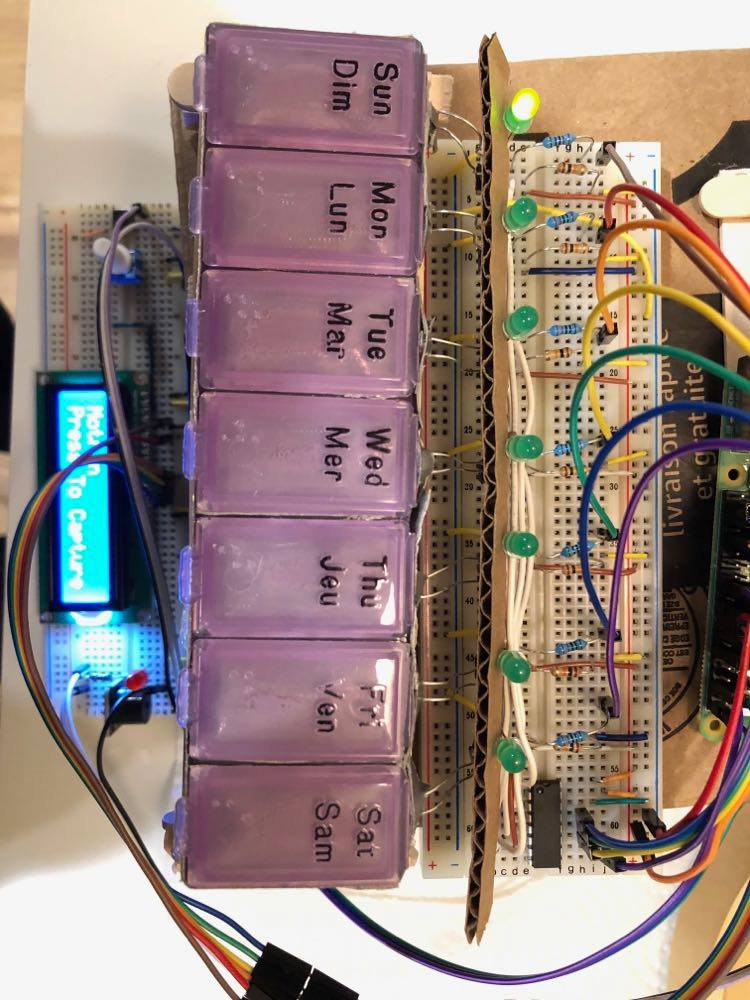
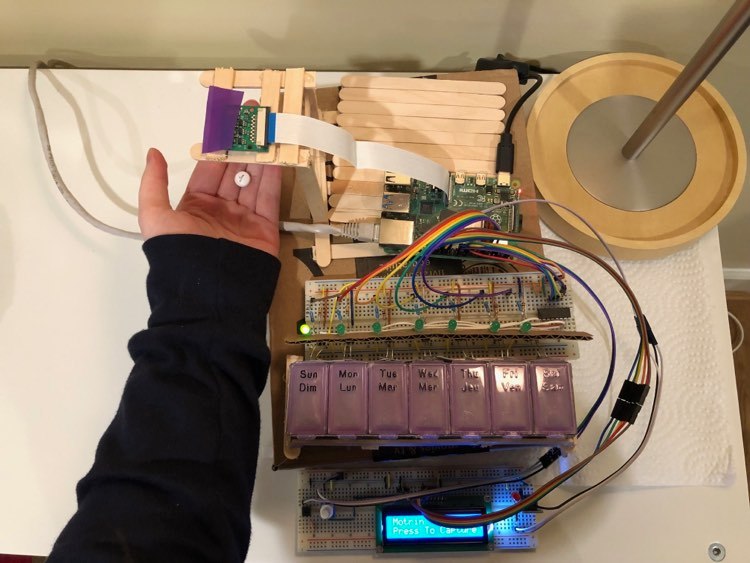
Pillvisor is a smart pillbox made using a combination of hardware and machine learning. The interface that allows the user to set up the alarms is made with Python Flask which stores the alarms to firebase. A raspberry pi is synchronized to firebase to read the alarm times. When the alarm time comes, a buzzer noise goes off and keeps ringing until the user opens the correct pill box. This is evaluated using photoresistors under each pill box day to detect the opening and closing. Then the user can place their pill under the camera and a tensorflow model is used to verify that the correct pill was taken.
The Story
This is an project that I made during nwHacks 2021, a 24-hour online hackathon.
I teamed up with a friend from my computer engineering class and her two siblings. We all had different engineering backgrounds and wanted to utilize this opportunity to take advantage of our different skillsets by working on a project that wasn't purely software
Prior to the hackathon, we met up online to brainstorm some ideas and when we agreed on the project idea, we went to make sure we had all the hardware and software we needed installed properly to ensure things would go smoothly.
I worked mainly on the machine learning aspect of the project developing a convolutional neural network that could recognize pills. I was excited about this because I had just finished my machine learning course and was very excited to get to apply some of the things I learned in class to another project. So I worked on developing a convolutional neural network.
One of the things we struggled with the most was trying to integrate the neural network with the rest of the program due to issues importing tensorflow onto the raspberry pi.
In the end our team won Best Hardware Hack and we were super proud of what we accomplished
KA-CHING is a mobile gaming app made with Flutter that teaches children about saving money
The Story
This is an app that I made during Dub-Hacks 2020, an online 24-hour hackathon.
I teamed up with a friend from my computer engineering class, a friend from outside of school and two other people we met through a team formation event the night before the hackathon.
Prior to the hackathon, we met up online to brainstorm some ideas and when we agreed to make a mobile app, we went to make sure we had all the software we needed installed properly to ensure things would go smoothly.
This was my very first time using Flutter so I was a little lost on the overall structure but I was told that it was similar relatively similar to Java and one of my teammates was able to walk me through some of her code to help me get started. Overall it was a great learning experience and I'm glad to have learned a new skill that can help me in future hackathons and projects
After a few struggles and challenges and a lot of googling and watch video tutorials, we finally made a working product that we were proud of. There was the additional challenge of having one of our teammates in a different time zone than us so this made communication a little more difficult but we were happy that we were able to make it work
Mood.io is a digital mood journal that we made using Python, Flask, and the Google Cloud Natural Language Processor as a hacakthon project. The user can type out their journal entry in the space provided and when they enter the journal entry, Mood.io will scan the words from the journal entry to determine an overall sentiment score for the entry. The more cheerful and happy sounding the journal entry, the more positive the score and vice versa.
The Story
In my second year of engineering physics, I participated in western Canada's largest all hackathon known as nwHacks. While I've attended some hackathons in the past, this was my very first 24 hour hackathon so I was very excited.
I teamed up with a few friends in engineering physics, all of whom were first time hackers and we were all eager to learn and try something new.
Prior to the hackathon, we met up in person to brainstorm some ideas but we ultimately didn't decide on an idea until the opening ceremonies of the hackathon where we learned about some of the google cloud api's that we could use. We decided to use the google cloud natural language processor to make a mood journal.
After many struggles and getting help from mentors and a lot of googling, reading documentation and watching video tutorials, we finally figured out how to use the google cloud api and we made a working product that we were proud of.
Overall this was a very exciting experience for all of us and a great opportunity to learn.
A picture of our team as we prepare to demo our project while holding MLH official "I demoed" stickers
Servo Motor
October 2020-December 2020
Skills
What it does
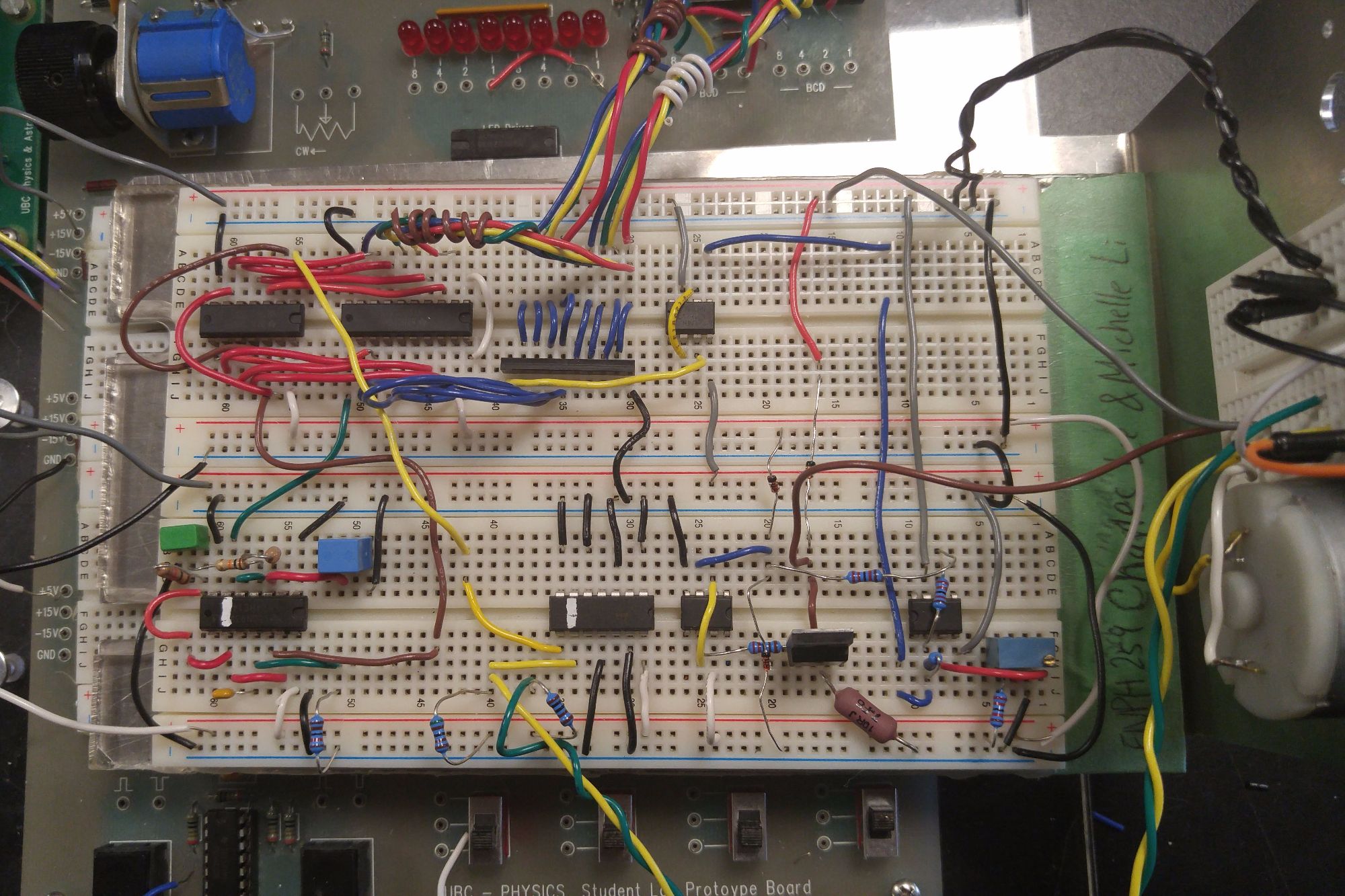
General Overview of Circuit: A servo loop uses a feedback loop to actively control a specific quantity such as its rotation speed or temperature. This has a wide variety of applications in everyday use and is often seen in thermostats and cruise control for cars. This experiment involves designing a circuit to control a motor's speed.
A disc is connected to the motor with a slit. When the motor spins it causes the slit to pass under an LED. Light lands on a photoresistor which then generates a clock pulse every time the slit passes through.
The clock pulse is inputted into a counter which counts the number of clock pulses between each reset pulse.
It then goes through an R-2R resistor ladder network to convert the digitial signal to an analog output which is then compared to the analog voltage of the motor. This output is used to control the current through the motor.
The Story
In my second year of Engineering Physics, I took a ENPH 259, an electronics lab course. As a final project, we built a circuit that could control a servo motor.
While we did run into many challenges while building and debugging the circuit, it gave us a much better understanding of how the entire circuit works in addition to a good opportunity to develop a systematic procedure for checking components in the circuit
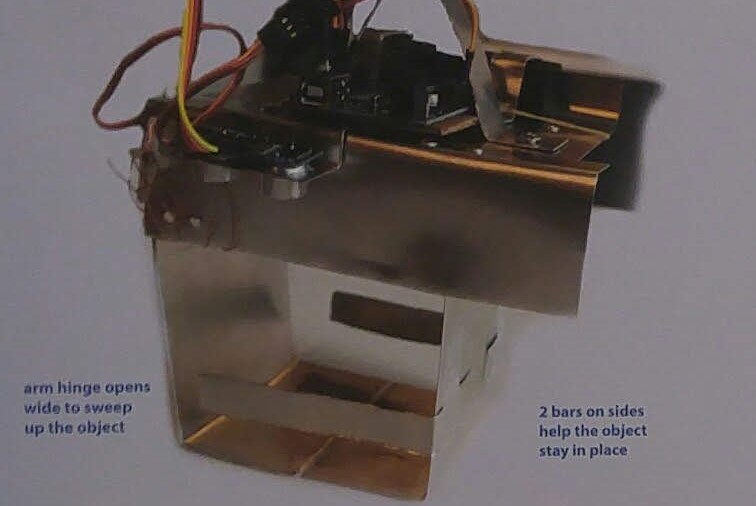
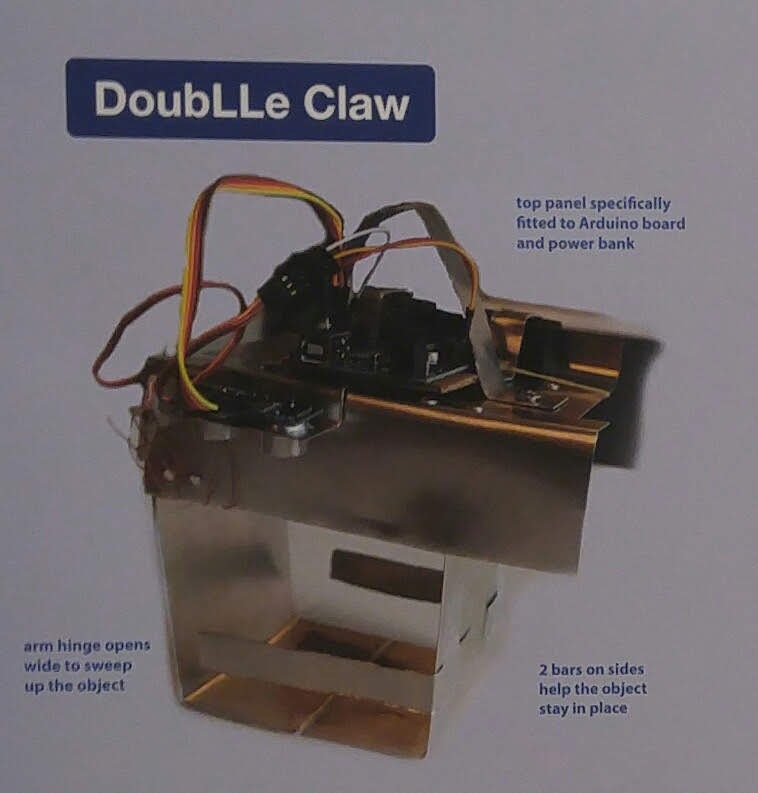
This is a robotic claw built using hand tools and sheet metal and programmed using an Arduino controller
The Story
In my first year of engineering, for my APSC 101 course, we built a robotic claw. This was a great opportunity for me to learn how to use hand tools to cut a shape sheet metal. It was also an introduction to using Arduino as well as follow the engineering design process and work as a team.
In this class we held a competition to see who could score the most points. The first round was the bulk round where the claw had to pick up as many pieces of pasta as possible. In the second round, it was the density round where the claw would pick up objects of the same shape but different densities. In the third round, teams collaborated with their claws to pick up as many various sized objects as they could in a short amount of time.
Our team decided to do designs and concept generation, prototyping and iteration together and when it came to building the claw, we split up to work on two separate claws, one for the density round and one for the round. My main role was designing the closing mechanism for the density round claw and writing the code that was used for both claws. Our team's claw was able to pick up most of the objects in the density round. And we were quite satisfied with our performance
Counsel Connect is a concept website made with html, css and javascript to connect students with each other to chat about mental health related topics as part of a 12 hour hackathon project
The Story
In my second year of Engineering Physics, I participated in UBC's local hack day, as a project we made a website that allows students to sign up to connect with each other and participate in a casual conversation
This website was a great introduction to hackathons for our team and we used this as an opportunity to learn and practice html, css and javascript
Kamino Game
October-November 2019
External Links:
Github Repo is private but can be made available upon request
Skills
What it does
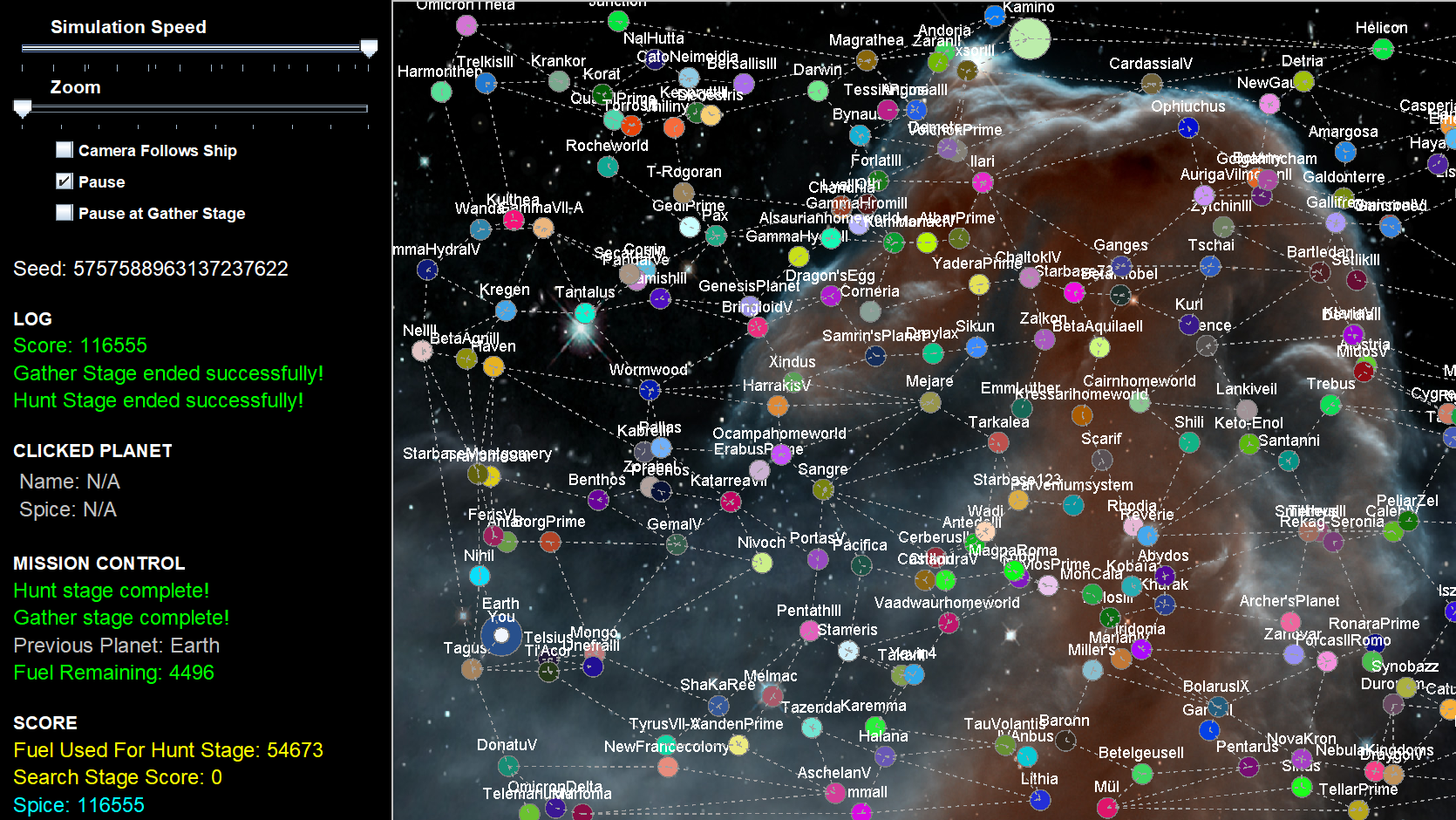
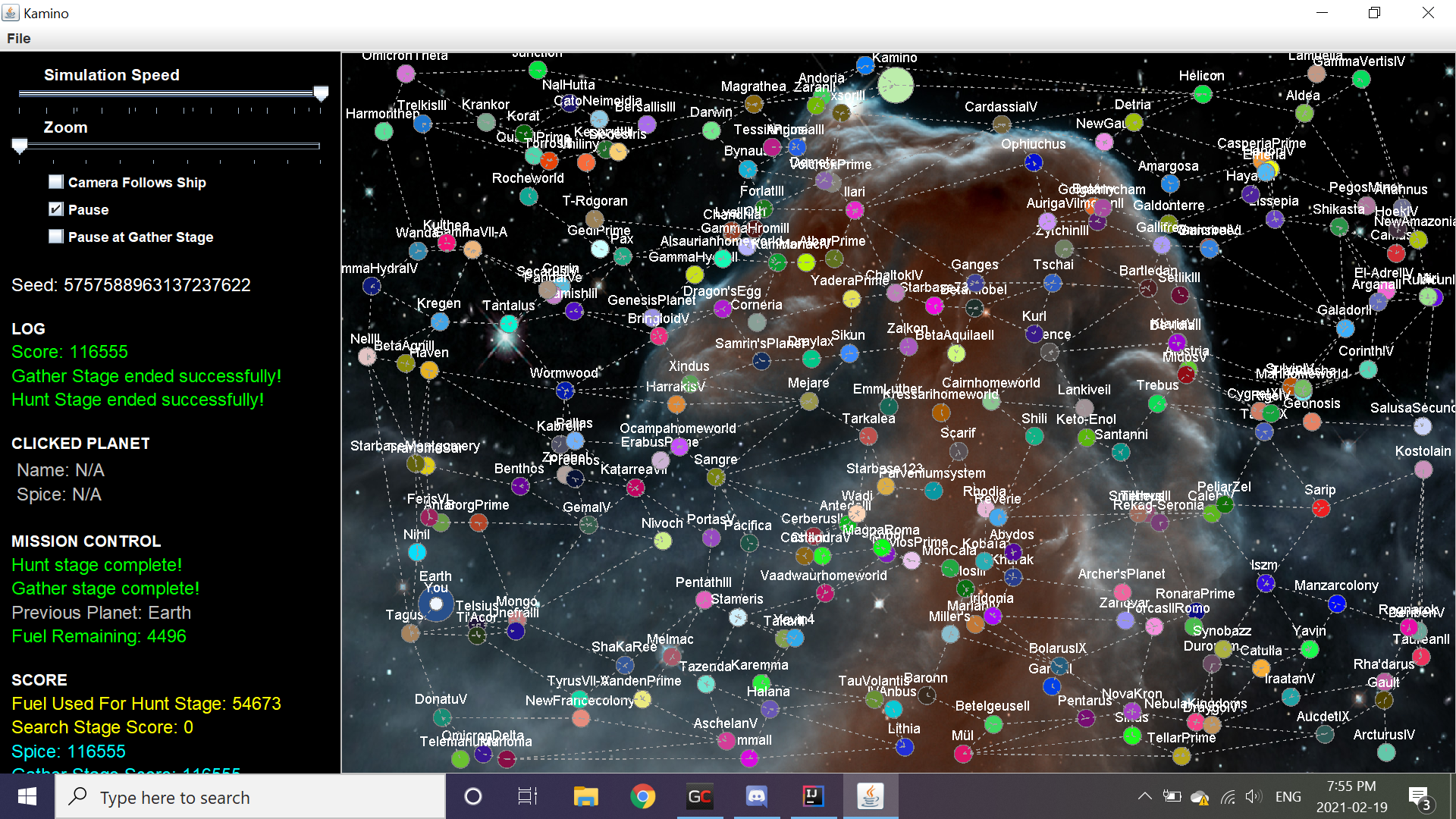
Kamino Game is a class project for CPEN 221, Principles of Software Construction. The goal of the project is to develop methods to allow a spaceship to navigate through a map, and find it's target planet and then gather as much spice as possible without running out of fuel.
I developed algorithms and created datatypes to represent a graph alongside my partner Emily. Algorithms developed include a depth first search, minimum spanning tree, and a shortest path algorithm. JUnit testing was used to achieve 100% branch coverage and to cover corner cases. Some software principles were applied to this project such as Generics, Abstraction, and Mutability
The Story
In my second year of Engineering Physics, I took a class known as CPEN 221, Principles of Software Construction. We did 3 projects in this course with a partner, each of which took between 1-2 months. Kamino Game was the second project in the course and was my favourite project overall! (Hence why it is feature on this site :D ) And we earned a perfect score on this project!
When my partner and I began this project, we were a little worried since the project requirements seemed to require a lot and we were still relatively new to software development. As the weeks progressed and we worked on the project we became more confident as we were able to develop these algorithms that initially seemed challenging to us. And we had fun interacting with the GUI interface that was provided for the project simulation!
The project was split into 3 tasks: Task 1: create methods to represent a graph such as adding/deleting edges and vertices, as well as being able to get the neighboring vertices of a given vertex Task 2: develop a get shortest path algorithm and a minimum spanning tree algorithm Task 3: Interface the graph representation code with the spaceship game by developing methods for the 2 stages of the game. The 1st stage was to implement a search algorithm to find the target planet Kamino. The 2nd stage was to return to Earth given a limited amount of fuel and gather as much spice as possible
We chose to implement a depth search algorithm as we were limited in time and it was an easier algorithm to implement than a breadth first search algorithm. To return to Earth, we chose to find the shortest path back to Earth first and then search through each planet to see if there was enough fuel to reach there and return to Earth. Thus ensuring we would always be able to return to Earth. While our algorithms were not optimized to maximize score and definitely had room for improvement, we ensured that they were reliable and guaranteed they would meet the passing criteria for any given map which is allowed us to meet the threshold to earn a perfect score on this project. If we were given more time we would optimize to algorithms to earn a higher score within the game.
In the summer of 2020, I had a weekly webcomic about a student who enjoys the little things in life. I mainly used Pixlr.com, a free online photo editor similar to photoshop to draw my comics.
I started this webcomic as an opportunity to explore my creative side and also as a way try to look at the positive side of life when school is rough
I started off by taking on some basic video editing and creation as a way to bring ideas to life. It mainly began when I decided I wanted to create transit race videos where 2 or more people would start at the same location and then race to another location by taking different transit routes
Then I got a vlogging camera (DJI Osmo Pocket) and decided to to to film some vlogs as a way to tell my own story and share my own adventures, all while getting more comfortable with the sound of my own voice.
I use a variety of different video editing tools mainly Windows Video Editor, Openshot, and Camtasia
My first video directed to a larger audience
A video I created that highlights moments from the Shell Eco Marathon 2022 as well as to PR of my design team UBC Supermileage
My first vlog where I highlight more of my personal experiences from the Shell Eco Marathon 2022
Hiking
What is this?
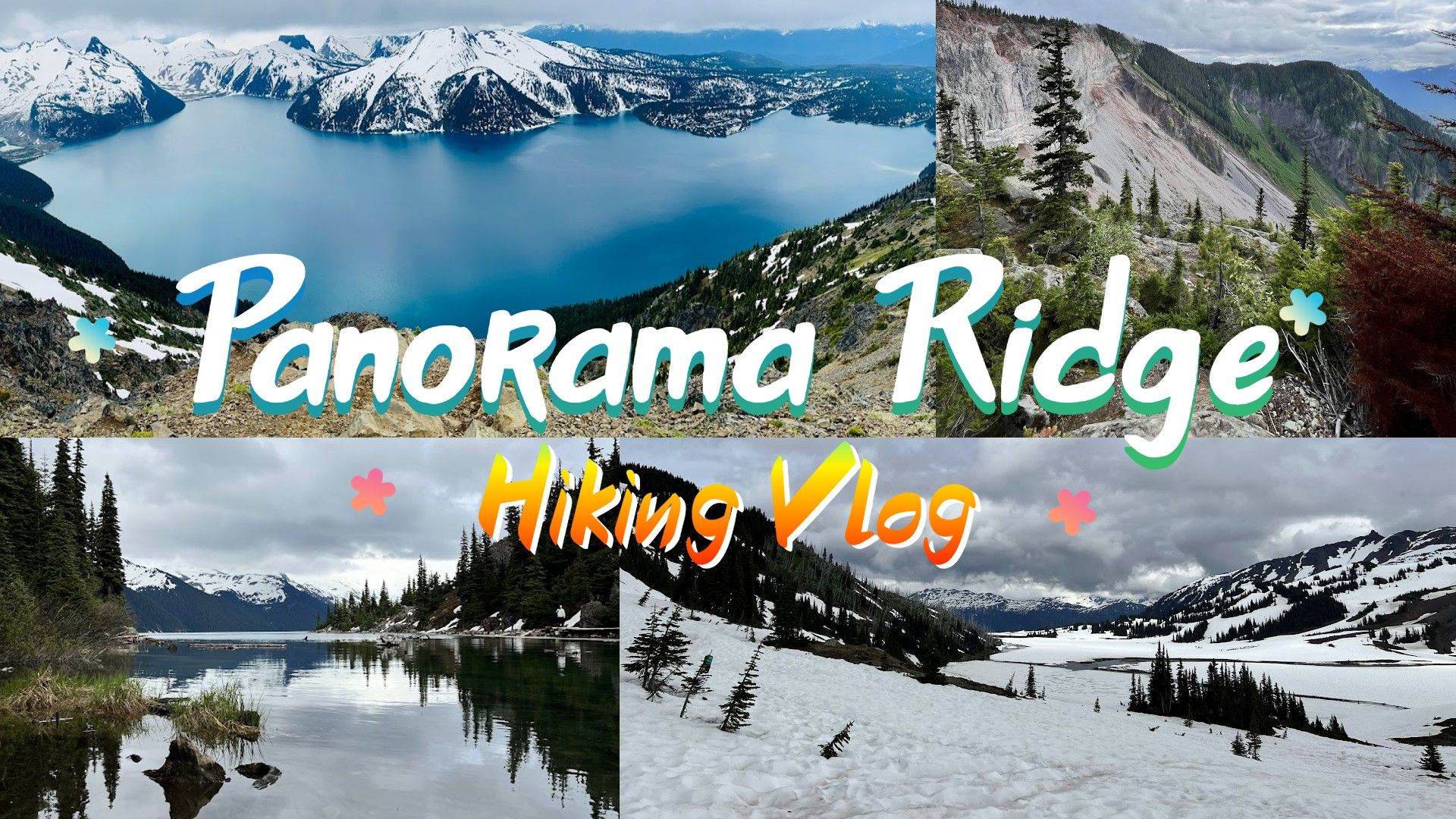
I love to go hiking in the Whistler and Squamish area in British Columbia, Canada. Below are some pictures of places that I've been.
Pictures:
This is a picture of Garibaldi Lake from the Panorama Ridge
This is a picture of the hike on the way from Panorama Ridge to Garbaldi Lake
Softball
What is this?
I've played baseball from age 8-12, afterwards I shifted over to softball where I continue to play from age 13-20
Pictures:
A news article about our softball team pulling multiple upsets and placing second in the provincials
Very good question! I liked the idea of using the naming scheme of <adjective> <noun> and since I liked plants and nature at the time of choosing a name, I liked the liked the sound of turnip. Then I tried to find a adjective that didn't associate too much with the noun and hence floatingturnip was chosen
Website was designed using bootstrap studio and hosted using Github pages. I chose to use bootstrap studio because it is free with the Github student pack and it's an easy way to quickly build a responsive website without having to write html css and javascript from scratch. And as I make edits to this page to add more features, I get to learn a some html css and javascript as I add custom code




















.jpg)